Robot assisted rehabilitation of the arm after stroke: prototype design and clinical evaluation
Peng, Liang; Hou, Zeng-Guang; Peng, Long; Luo, Lincong; Wang, Weiqun
Sci China Inf Sci, 2017, 60(7): 073201
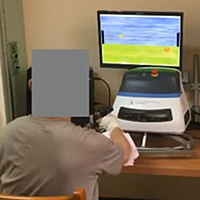
Robot assisted rehabilitation training is a promising tool for post-stroke patients’ recovery, and some new challenges are imposed on robot design, control, and clinical evaluation. This paper presents a novel upper limb rehabilitation robot that can provide safe and compliant force feedbacks to the patient for the benefits of its stiff and low-inertia parallel structure, highly backdrivable capstan-cable transmission, and impedance control method in the workspace. The “assist-as-needed” (AAN) clinical training principle is implemented through the “virtual tunnel” force field design, the “assistance threshold” strategy, as well as the virtual environment training games, and preliminary clinical results show its effectiveness for motor relearning for both acute and chronic stroke patients, especially for coordinated movements of shoulder and elbow.