Modeling and analysis of an underwater biomimetic vehicle-manipulator system
Bai, Xuejian; Wang, Yu; Wang, Shuo; Wang, Rui; Tan, Min; Wang, Wei
Sci China Inf Sci, 2022, 65(3): 134201
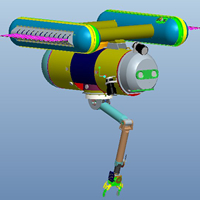
In recent years, underwater vehicle-manipulator systems (UVMSs) have captured researchers' attention. Inspired by fish, bionic mechanisms were introduced into a UVMS. The underwater biomimetic vehicle-manipulator system (UBVMS) is actuated by two symmetrically arranged biomimetic undulatory fin propulsors. Based on the UBVMS, some topics have been researched, such as freefloating autonomous operation, three-dimensional helical path following, and underwater video processing. An accurate mathematical model is beneficial to the coordinated control of the UBVMS. Therefore, this article dedicates on the study of hydrodynamic model and analysis for the UBVMS, involving an identification of hydrodynamic coefficients of the UBVMS, the hydrodynamic analysis of the manipulator, and the hydrodynamic analysis of the undulatory fin propulsors.